
Following on from the short demonstration of Lidar images after the NWOC AGM last Wednesday I thought I would prepare some images showing some of the information of Ballykelly forest which we looked at, along with some extras.
We are fortunate now that NIOA and the clubs have free access to much of the maps and data which is available to buy from Land and Property Services (formerly OSNI maps). Included in this is Rivers Agency Lidar data (note very limited coverage – coverage can be viewed on the Arcgis Website

Although there are limitations to what we can get out of this information, NIOA and the clubs should certainly make use of it where applicable. However this is going to mean a “learning experience” for anyone locally who wants to be able to make their own basemap using this material. However, different skills suit different people and there might some “techy” people within us who would relish the thought of getting their hands on this sort of thing.
In the recent past orienteering basemaps were generally produced using the process of photogrammetry using stereo aerial photographs. This allowed everything visible from the air to be traced onto the basemap along and also allowed contours to be produced. There are now modern equivalents to this which are automated and if the photography is good enough can be very accurate.
The problem has always been, how to improve contours where the ground cannot be seen directly from the sky, i.e. underneath trees. In the past skilled photogrammetrists with orienteering experience did their best to adjust for the height of the trees in order to get approximate contours for the basemaps.
LIDAR which we talked about after the AGM (stands for Light Ranging and Detection) is a more sophisticated equivalent. It is now widely used across the world and within industry for picking up not only topographical information but also that relating to trees and vegetation. I suggest that you search for “How Lidar works” and look at some images to explain. Basically an aircraft (plane or drone) flys a special camera which emits millions of little pulses of light towards the ground. The return characteristics of each pulse are recorded and analysed. Over a forested area the first return from a pulse is from the tops of vegetation with the last being from the hard ground. Multiple in between pulses can give information on sub-canopies as well.
The images included here show some extracts from the LPS information and Lidar for exactly the same geographical area at Ballykelly forest. Georeferencing is a key aspect to ensuring that such information can be overlaid accurately and processed to get most use out of it. The data comes already georeferenced and it is just a matter of ensuring that this is retained as we work with the information.
Please note all the images below will open in a large window on double clicking and can then also be viewed as a slide show.
1 – OSNI extract
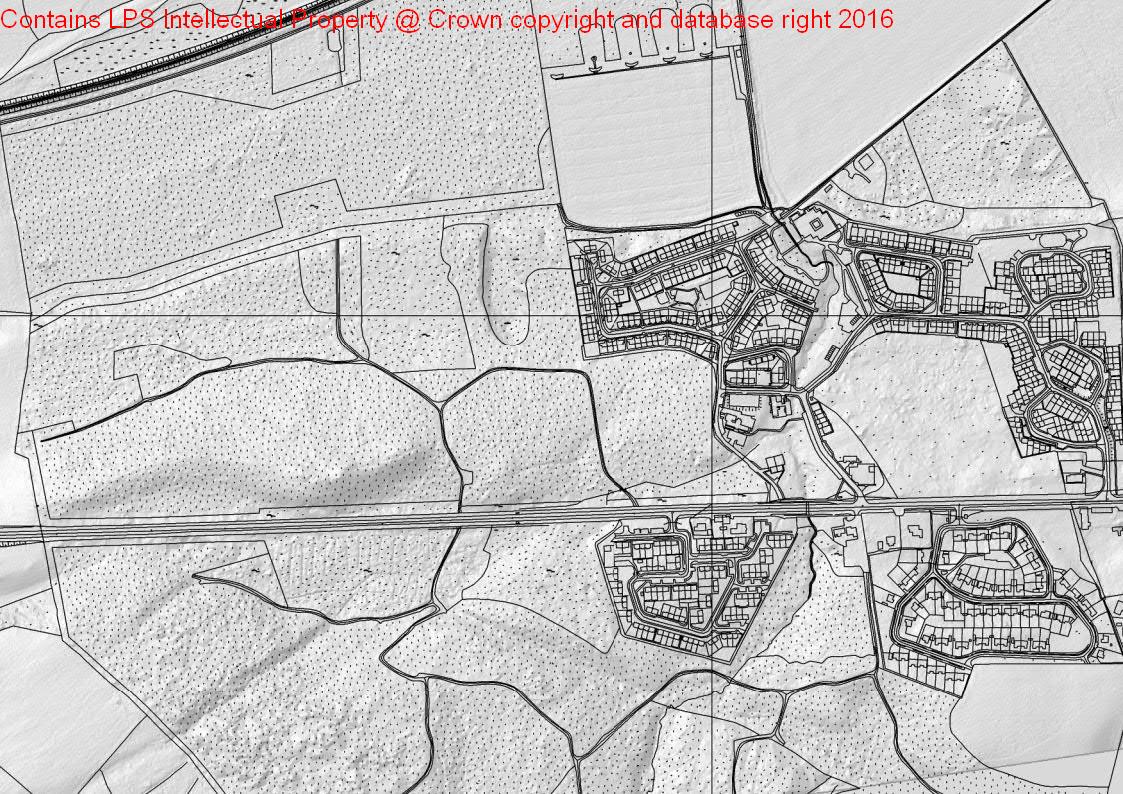
This is the large scale OSNI map information. It comes in a layered format which helps when working with it. This would be most useful for urban areas.
2 – OSNI enhanced contours
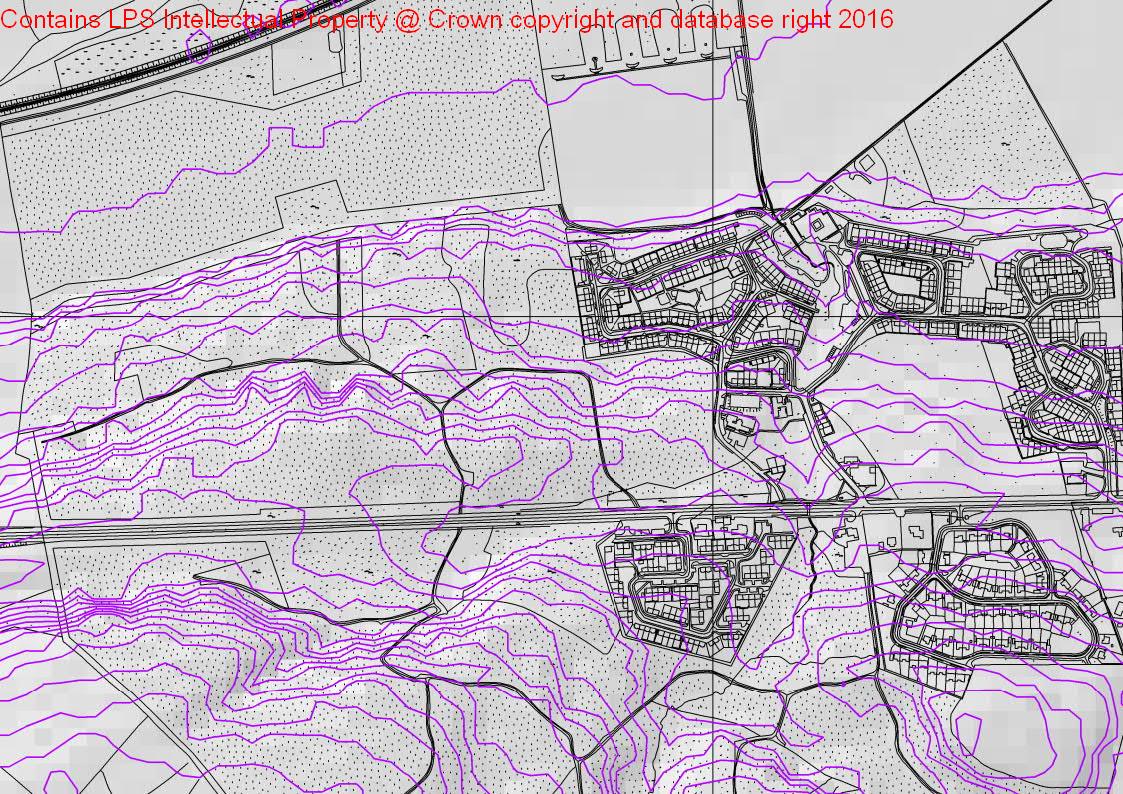
This shows 2.5m contours generated from the “Enhanced height information” available from LPS. As you can see this gives a poor representation of ground shape in comparison to the Lidar contours in image 3.
3 – Terrain hill shading
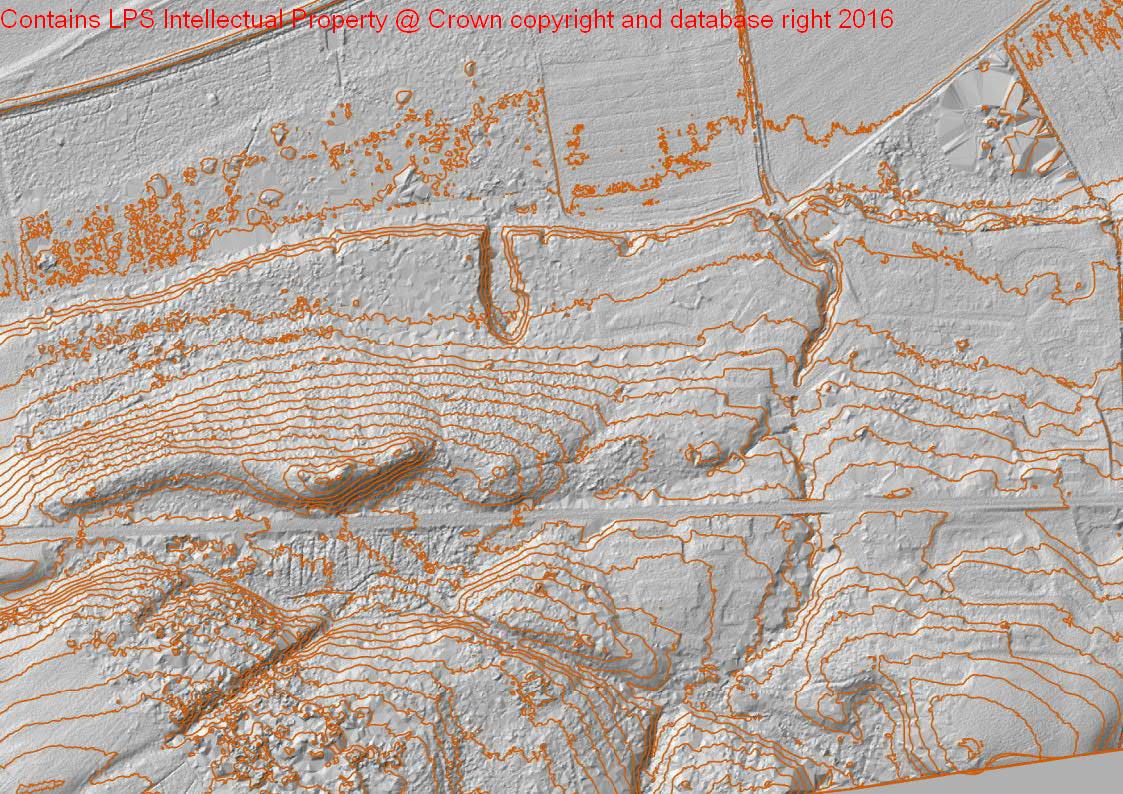
This shows hill shading and 2.5m contours generated from Lidar. The Lidar should give height information at approximately 1 point per square meter. However, note that if you look carefully at the hill shading there are some areas which have flat triangular characteristics. There appear to be gaps in the Lidar information here – so it is not perfect. As you can see also there are a lot of individual hills showing on the contours, particularly on flat areas which are most likely not there. In other words ground survey is still very important.
4 – Tree-top hill shading

This shows hill shading based upon the first return figures. You can clearly see the tree tops and roofs of buildings.
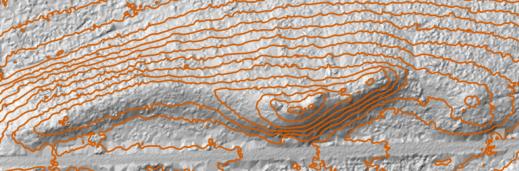
5 – Vegetation
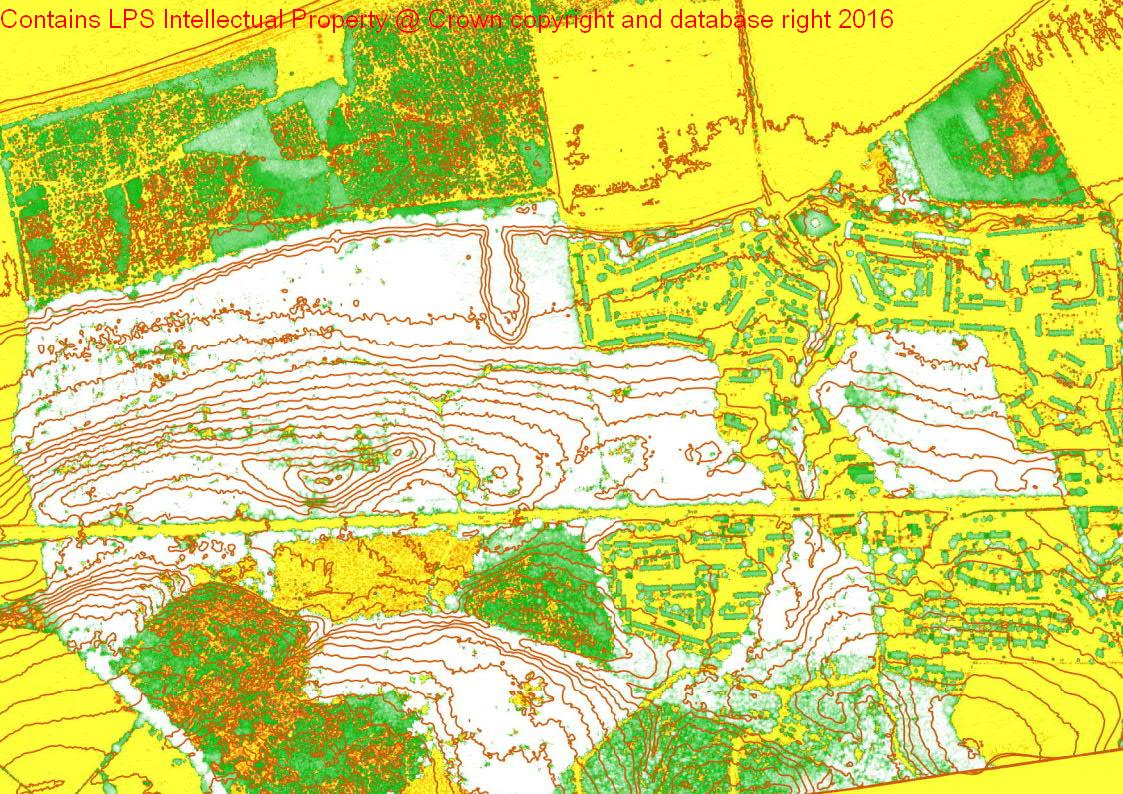
The OCAD software has inbuilt capabilities to compare the ground return pulses with the tree top return pulses and using this it can classify the heights of the trees and convert this into colour ranges. This is what you see here. Depending upon the quality of Lidar I believe that even ground vegetation under trees can be picked up separately to give further guestimates on likely runnability. As it is as you can see this would be useful for showing clearings, tree edge lines and vegetation boundaries on the basemap.
Steven Linton
North West Orienteering Club
January 2017